ロボットの開発で最も大切なことは目的をはっきりさせること――第125回(下)
独立行政法人海洋研究開発機構 海洋工学センター 海洋技術開発部探査機技術グループ 技術研究員 工学博士 中谷武志
構成・文/浅井美江
撮影/津島隆雄
週刊BCN 2014年12月15日号 vol.1559掲載
将棋好きの中谷さんは、京都洛南高校時代、将棋部を創設した。「将棋大会に出たい。この仲間たちと一緒にやりたい」と、署名まで集めて部の創設に奔走。結果は、創部1年にして、京都府の大会で3位を獲得。共に戦った部員とは未だに交流があるそうだ。対談していて感じたのだが、中谷さんには「この人と一緒に何かをしたら、おもしろいだろうな」と思わせるものがある。はじけるような笑顔に、人を惹きつけ、巻き込むマジックが宿っているのかもしれない。(本紙主幹・奥田喜久男 構成・浅井美江 写真・津島隆雄) 【取材:2014.9.9/JAMSTEC 横須賀本部にて】
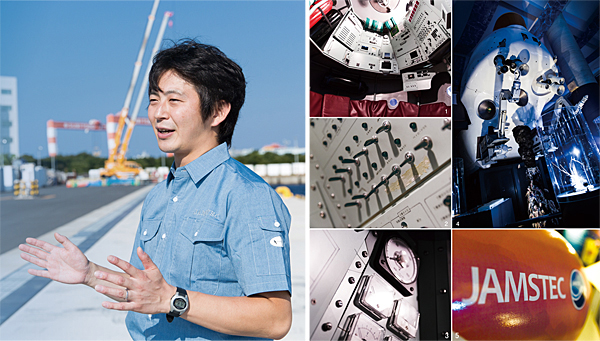
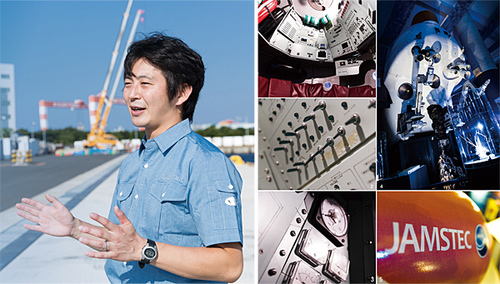
展示ロビーには、潜水調査船や探査機の模型、深海環境のジオラマが並ぶ。
写真1 有人潜水調査船「しんかい6500」実物大模型のコクピット内
写真2・3 コクピット内には精巧な計器が装備されている
写真4 「しんかい6500」と深海環境のジオラマ
写真5 自律型無人探査機「ゆめいるか」の2分の1模型
心に響く人生の匠たち
「千人回峰」というタイトルは、比叡山の峰々を千日かけて駆け巡り、悟りを開く天台宗の荒行「千日回峰」から拝借したものです。千人の方々とお会いして、その哲学・行動の深淵に触れたいと願い、この連載を続けています。
「人ありて我あり」は、私の座右の銘です。人は夢と希望がある限り、前に進むことができると考えています。中学生の頃から私を捕らえて放さないテーマ「人とはなんぞや」を掲げながら「千人回峰」に臨み、千通りの「人とはなんぞや」がみえたとき、「人ありて我あり」の「人」が私のなかでさらに昇華されるのではないか、と考えています。
「千人回峰」というタイトルは、比叡山の峰々を千日かけて駆け巡り、悟りを開く天台宗の荒行「千日回峰」から拝借したものです。千人の方々とお会いして、その哲学・行動の深淵に触れたいと願い、この連載を続けています。
「人ありて我あり」は、私の座右の銘です。人は夢と希望がある限り、前に進むことができると考えています。中学生の頃から私を捕らえて放さないテーマ「人とはなんぞや」を掲げながら「千人回峰」に臨み、千通りの「人とはなんぞや」がみえたとき、「人ありて我あり」の「人」が私のなかでさらに昇華されるのではないか、と考えています。
株式会社BCN 会長 奥田喜久男
<1000分の第125回(下)>
※編注:文中に登場する企業名は敬称を省略しました。
※編注:文中に登場する企業名は敬称を省略しました。
まるで「初めてのおつかい」 可愛いロボットには旅をさせよ!
奥田 中谷さんの今の仕事について教えてください。中谷 海中ロボットのなかでも、主に自律型海中ロボット(AUV, Autonomous Underwater Vehicle)の研究開発をしています。入社後、「じんべい」「ゆめいるか」「おとひめ」という3機のAUV開発に携わってきました。
奥田 AUVはいわゆる「鉄腕アトム」タイプ(前号参照)ですよね。ケーブルもない、電波も届かない海中で、操作はどうするんですか。
中谷 そこが非常に重要なんです。ケーブルレスのため、支援母船から電力を供給できないので、ロボット本体に電池をもたせ、搭載センサで得られた画像や音波で判断をして自律的に動くようにプログラミングします。
奥田 海底に潜っていくのもプログラミングですか。
中谷 そうです。船から降ろしたら、少しずつ降下して、海底近くまで行ったら、海底との距離を測る。なおかつ、圧力計で深度を測って、決められた深度に到達したら観測作業を始める。そして常に音波を発して周囲の障害物を検知し、それがあったら避ける。突然、推進器(スクリュー)が壊れたり、耐圧容器内に水が入ったりしたら浮上してくる。これらは、すべてプログラムです。
奥田 今、人間が運転しなくても動くという自動車の開発に注目が集まっている。それに似ていますね。
中谷 結局、プログラミングに失敗した部分があれば事故に繋がり、最悪の場合は帰ってきません。そこをいかに安全に設定するかなんですが、安全サイドにいきすぎるとチキン(弱虫)なことになって、回避できる障害物も回避しようとしないで、ちょっとした機器故障でも浮上してきてしまう。これでは仕事になりません。そこで、異常に対してレベル分けを行い、そのレベルによって対処方法を切り替えています。とはいえ本当に重要なところが壊れて、すぐに浮上してくることも実際にはあります。
奥田 ……おもしろいなあ。
中谷 開発中のロボットを潜航させるときは、毎回「初めてのおつかい」のような感覚です。遠くにわが子を行かせる親のような気持ち。ワクワクするけど、無事に帰ってくるまで内心ではハラハラドキドキしています(笑)。
奥田 中谷さんはロボットをつくる、どの部分を担当されているのでしょう。
中谷 主にソフトウェアの開発です。
奥田 ソフトウェアはハードがなければ、ただのプログラミングですよね。ソフトとハードの兼ね合いというのはどういうふうに考えるのですか。
中谷 浮力材や耐圧容器、電池や推進器は、単体ではただのパーツです。しかし、それらをつなぎ合わせて、各パーツと通信ができるようにプログラミングをして、システムの中に組み込むと、それぞれのパーツが有機的に動き出す。ソフトウェアがハードウェアをつなげて、一つの生き物=ロボットとして、命を吹き込むといいますか。
奥田 ロボットをつくるうえで一番重要なことはなんですか。
中谷 まず目的として何をしたいかです。ゴールをはっきりさせて、何が必要かを考えてデザインを決めていきます。
奥田 何を目的とするのか……。深く潜りたいということでしょうか。
中谷 それもありますが、私が担当している探査機は、海底資源を見つける、調査するというのが一番の使命なんです。日本周辺の水域にはレアメタルやメタンハイドレートなどの海底資源が豊富に眠っています。それらを日本の資源として活用することを目指しています。
地球環境変動の分析と理解に探査機を役立てたい
奥田 今ある技術は日進月歩ですよね。技術レベルが変われば、プログラミングも変えなければならない。中谷 プログラミングも変わるし、ハードウェアも変わります。最近のAUV開発はコンパクト化に向かっていて、例えば「じんべい」や「ゆめいるか」は4~5mクラス。これを可能にしたのが、技術進歩による各機器の小型軽量化と新しい装置の登場です。例えば、現場型海水成分装置の開発。これまではロボットに大きな自動採水器を搭載して目的地点ごとに水を採取して持ち帰って測定したのですが、高圧下でも正確に測定できる小型の海水成分装置を開発し、持ち帰らずともその場で測定できるようにしました。このことによって、決まった点でしか採取・測定できなかったのが、ずっと連続して計測できるようにもなったんです。
奥田 AUVがすべてやってくれるのですね。
中谷 でも、AUVがすべてではありません。有人潜水調査船「しんかい6500」が、今年25周年を迎え、次世代船をつくろうという話が出ています。つくるならフルデプス。つまりチャレンジャー海淵(1万900m)への潜航が可能になる調査船をつくろうとしています。結局、自動化とか自律化が主流になるといっても、生身の人間が実際に現場に行き、五感、六感で感じるものは大切です。だから深海に有人でいくということはとても重要だと思っているし、それにも乗りたいですね。チャレンジャー海淵は、私の研究人生のきっかけをつくってくれた場所ですし。
奥田 具体的な目標としてそこに行く、と。
中谷 予算もこれからなのでわかりませんが、個人的には10年以内には実現したいですね。
奥田 ほかに考えておられることはありますか。
中谷 海はとにかく広く、全地球で考えると今は点でしか海底を観測できていません。その未知なる深海を明らかにしたい。例えば、自律無人船なるものを開発して、研究船のかわりにAUVを搭載して港から出航し、現場海域でAUVを投入して調査、そして回収して港に戻ってくる。そこまで自動化を進めたい。これは20年先かな。
奥田 なるほど。では、ぐっと飛んで、40年先は?
中谷 え!? 40年先ですか。定年になってますねえ。妻の実家の石垣島で、畑を耕して、スキューバダイビングをやってるかもしれません。
奥田 おや。スキューバをやりたくて、石垣島から奥さん選んだの?
中谷 いや違います! たまたまです!
こぼれ話
目の前には東京湾の海が広がる。心が広々して、深呼吸したくなる。隣接する埠頭では日産自動車のクルマの船積みが行われている。対岸に目をやると、遠くに軍艦が見える。横須賀の米海軍基地に停泊する船だ。海洋研究開発機構は、目前は海という環境にある。施設の埠頭には幾つかのコンテナが整然と並んでいる。中身は何かと思ったら、海中探査機だそうだ。撮影のために探査機の内部に入った。すると奥のほうに一升瓶が置いてある。一瞬、見てはいけないものを見たのかしらと思いきや、「調査するにあたって、お酒は重要なコミュニケーションツールなんですよ」。海中ロボットを操作するのは中谷さんだが、船の操舵は船員の皆さんだ。「クルーの皆さんとの意思疎通が調査内容を左右する」というわけだ。
ロボットを開発するのも操作するのも多くの人の意思の疎通が働いている。人つながりの技術がものをいう世界でもある。道理で中谷さんの人当たりは高感度だ。
Profile
中谷 武志
(なかたに たけし) 1981年、兵庫県の赤穂に生まれる。京都洛南高校から東京大学に進み、2004年、同大学工学部卒業。この年、日本造船学会から、卒業論文の成績上位者2人に授与される奨学褒賞を受賞。2009年、東京大学大学院工学系研究科博士課程修了。東京大学生産技術研究所の浦環(うら たまき)教授の下で、“自律型海中ロボット”の開発に関わる。2010年、JAMSTEC入所。海洋工学センターで海中探査機の開発、次世代探査機に関わる要素技術の研究開発に勤しんでいる。